Design
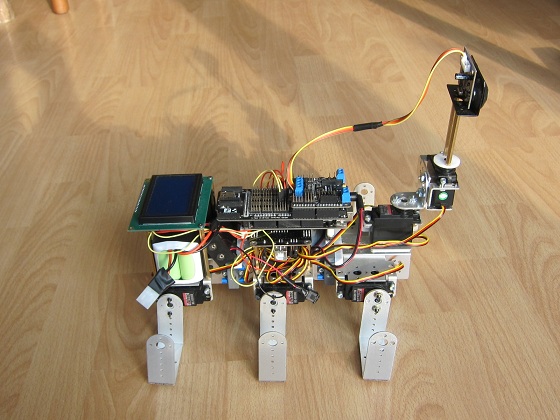
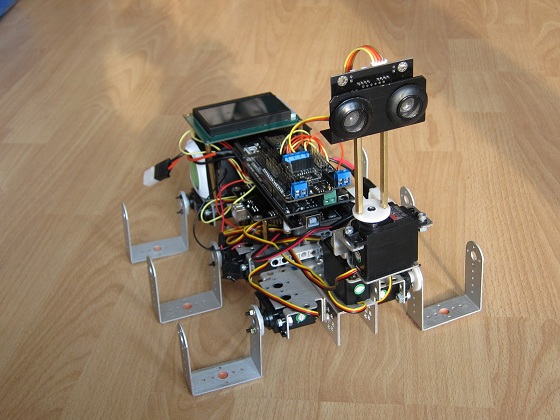
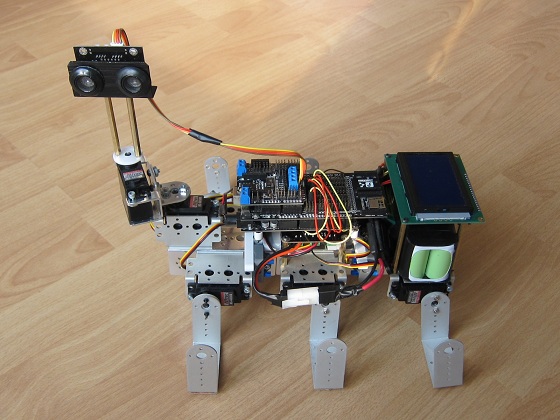
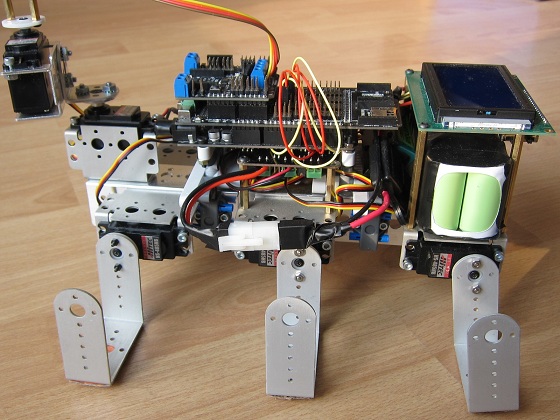
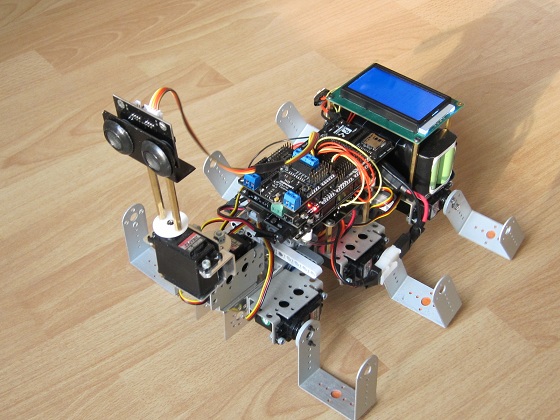
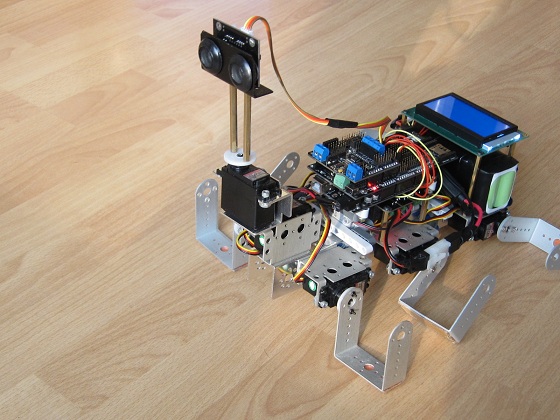
This robot has six legs and can move forward, backward, turn left and
right. It uses an ultrasonic sensor to detect obstacles and always try
to walk in the direction with the most space. It is equipped with a LCD
display to print debug information. The following pictures show the
crawler robot.When powered on, the robot will do a random walk by first deciding whether to go forward, left or right randomly and then decide how many steps to go in that direction, again, randomly. If the ultrasonic sensor detects an obstacle in front, the robot will stops, and then use the ultrasonic sensor to scan the front 180 degree space to decide the next proper direction to go -- the direction with the most space.
 |
 |
 |
 |
 |
 |
Components
- Arduino mega 2560. This board serve as the brain of the robot.
- Arduino mega IO expansion V2.1. This IO expansion facilitates the connection of sensors.
- 32 Servo controller. Used to control the eight servos used in the
robot. The controller supports large current.
- XBee IO expansion V5. This shield has a RS485 slot, which is needed by the URM04 V2.0 ultrasonic sensor.
- URM04 V2.0 ultrasonic sensor, used to detect obstacles. There are
a few tricks to use this ultrasonic sensor, please check here.
- A LCD display, used to print debug information.
- Eight Hitec 485HB servo. 6 used to construct legs, and 2 used to support 360 degree movement of the ultrasonic sensor. Because each servo can move only 180 degrees.
- One 9V battery to servo as logic power to the Arduino board, the servo controller.
- One 6V 6000mah battery to power all the servos.
- Various aluminum
Video
The video below shows the crawler working:Source code
#include <Wire.h>
#include "LCD12864RSPI.h"
// Chinese character display
unsigned char currentOrder[] = {0xC3, 0xFC, 0xC1, 0xEE, ':'};
unsigned char left[] = {0xD7, 0xF3, 0xD7, 0xAA};
unsigned char right[] = {0xD3, 0xD2, 0xD7, 0xAA};
unsigned char forward[] = {0xCF, 0xF2, 0xC7, 0xB0};
unsigned char backward[] = {0xCF, 0xF2, 0xBA, 0xF3};
unsigned char forwardBackward[] = {0xC7, 0xB0, 0xBA, 0xF3};
unsigned char stepCount[] = {0xB2, 0xBD, 0xCA, 0xFD, ':'};
unsigned char stepLabel[] = {0xB2, 0xBD};
// Structure to define movement
// A movement for example, left, consists of several phases.
typedef struct Movement{
int dir; // Identifier to indicate type of movement: 0 left; 1 right; 2 forward; 3 backward; 4 initialize.
int *times; // time in milliseconds used to perform each phase of a movement
char** servos; // servo position control
int phases; // number of phases in a single movement
int stepCount; // the number of steps for this type of movement.
};
Movement rMove; // Right movement
Movement lMove; // Left movement
Movement fMove; // Forward movement
Movement bMove; // Backward movement
Movement iMove; // Initialization movement
// Servo positions for each type of movement
char* lServos[] = {"#1 P1200 #4 P1200", "#0 P700 S1500 #3 P2300 S1500", "#1 P1500 S1000 #4 P1500 S1000", "#0 P1500 #3 P1500"};
char* rServos[] = {"#1 P2100 #4 P2100", "#0 P700 S1500 #3 P2300 S1500", "#1 P1500 S1000 #4 P1500 S1500", "#0 P1500 #3 P1500 "};
char* fServos[] = {"#1 P2000 #4 P1000", "#0 P700 S1500 #3 P2300 S1500", "#1 P700 S1000 #4 P2300 S1000", "#0 P1500 #3 P1500 "};
char* bServos[] = {"#1 P1000 #4 P2000", "#0 P700 S1500 #3 P2300 S1500", "#1 P2300 S1000 #4 P700 S1000", "#0 P1500 #3 P1500 "};
char* iServos[] = {"#0 P1500 #1 P1500 #2 P1500 #3 P1500 #4 P1500 #5 P1500"};
// Time used for each phase of each movement.
int lTimes[] = {200, 200, 200, 200};
int rTimes[] = {200, 200, 400, 200};
int fTimes[] = {300, 400, 500, 300};
int bTimes[] = {300, 400, 800, 300};
int iTimes[] = {500};
// Position to display messages.
int messagePosition[8] = {2, 5, 1, 5, 3, 5, 3, 5};
boolean shouldChangeDirection = false; // Should next movement be used to change direction, in case that an obstacle is detected by the ultrasonic sensor.
boolean isForward = true; // If current direction is forward
int EN = 2; // Pin number to enable XBee expansion board V5
// Measure distance using the URM04V2 ultrasonic sensor.
void measureDistance(byte device) {
digitalWrite(EN, HIGH);
// Trigger distance measurement.
uint8_t DScmd[6]={0x55,0xaa,device,0x00,0x01,0x00};
for(int i=0; i<6; i++) {
Serial.write(DScmd[i]);
DScmd[5] += DScmd[i];
}
delay(30);
// Send command to read measured distance.
uint8_t STcmd[6]={0x55,0xaa,device,0x00,0x02,0x00};
for(int i=0; i<6; i++) {
Serial.write(STcmd[i]);
STcmd[5] += STcmd[i];
}
delay(3);
}
// Return last measured distance by the URM04V2 ultrasonic sensor.
// -1 means the last measurement is out of range or unsuccessful.
int readDistance() {
uint8_t data[8];
digitalWrite(EN,LOW);
boolean done = false;
int counter = 0;
int result = -1;
while(!done){
int bytes = Serial.available();
if(bytes==8) {
for(int i=0; i<8; i++) {
data[i] = Serial.read();
}
result = (int)data[5] * 256 + data[6];
done = true;
} else {
delay(10);
counter++;
if(counter==5) {
done = true;
}
}
}
return result;
}
// Perform movement m by repeating it for steps times.
boolean performMovement(struct Movement *m, int steps) {
boolean inChange = false;
if(shouldChangeDirection) {
inChange = true;
}
for(int s=0; s< steps; s++) {
for(int i=0; i<m->phases; i++) {
Serial3.println(m->servos[i]);
delay(m->times[i]);
if(!inChange) {
changeHeading();
if(shouldChangeDirection) {
return shouldChangeDirection;
}
}
}
m->stepCount++;
int number = 0;
if(m->dir==3 || m->dir==4) {
number = fMove.stepCount + bMove.stepCount;
} else {
number = m->stepCount;
}
if(m->dir!=5) {
displayNumber(messagePosition[m->dir * 2], messagePosition[m->dir * 2 + 1], number);
}
}
if(inChange) {
shouldChangeDirection = false;
}
return false;
}
void setup()
{
lMove.servos = lServos;
lMove.times = lTimes;
lMove.phases = 4;
lMove.stepCount = 0;
lMove.dir = 0; //Left
rMove.servos = rServos;
rMove.times = rTimes;
rMove.phases = 4;
rMove.stepCount = 0;
rMove.dir = 1; //Right
fMove.servos = fServos;
fMove.times = fTimes;
fMove.phases = 4;
fMove.stepCount = 0;
fMove.dir = 2; //Forward
bMove.servos = bServos;
bMove.times = bTimes;
bMove.phases = 4;
bMove.stepCount = 0;
bMove.dir = 3; //Backward
iMove.servos =iServos;
iMove.times = iTimes;
iMove.phases = 1;
iMove.stepCount = 0;
iMove.dir = 5;
randomSeed(analogRead(0));
// Initialize LCD display.
LCDA.Initialise();
delay(100);
LCDA.CLEAR();
LCDA.DisplayString(0, 0, currentOrder, 5);
LCDA.DisplayString(1, 0, left, 4);
LCDA.DisplayString(1, 2, stepCount, 5);
LCDA.DisplayString(2, 0, right, 4);
LCDA.DisplayString(2, 2, stepCount, 5);
LCDA.DisplayString(3, 0, forwardBackward, 4);
LCDA.DisplayString(3, 2, stepCount, 5);
// Initialize all servos to neutral position.
Serial3.begin(115200);
Serial3.println("#0 P1500 #1 P1500 #2 P1500 #3 P1500 #4 P1500 #5 P1500 #6 P1500 #7 P600");
pinMode(EN, OUTPUT);
Serial.begin(19200);
delay(200);
digitalWrite(EN,HIGH);
delay(2000);
}
void changeHeading() {
measureDistance(0x11);
int distance = readDistance();
if(distance !=-1) {
if(isForward) {
if(distance < 15) {
shouldChangeDirection = true;
}
} else {
}
}
}
// Display the current order.
void displayCurrentOrder(unsigned char *order, int steps) {
LCDA.DisplayString(0, 3, order, 4);
String txt = String(steps);
char* buf = " ";
txt.toCharArray(buf, 4);
buf[2] = 0xB2;
buf[3] = 0xBD;
LCDA.DisplayString(0, 5, (unsigned char*)buf, 4);
}
// Display a number in row and column.
void displayNumber(int row, int column, int number) {
String txt = String(number);
char* buf = " ";
txt.toCharArray(buf, 5);
LCDA.DisplayString(row, column, (unsigned char*)buf, txt.length());
}
// Turn the robot to the right.
void turnRight(long steps) {
displayCurrentOrder(right, steps);
performMovement(&rMove, steps);
}
// Turn the robot to the left.
void turnLeft(long steps) {
displayCurrentOrder(left, steps);
performMovement(&lMove, steps);
}
// Move the robot forwards.
void goForward(long steps) {
displayCurrentOrder(forward, steps);
performMovement(&fMove, steps);
}
// Move th robot backwards.
void goBackward(long steps) {
displayCurrentOrder(backward, steps);
isForward = false;
performMovement(&bMove, steps);
isForward = true;
}
long lastMove = 0;
long move=0;
// Check which way to go next by finding the direction where the obstacle is the farest away.
// dirs will be setup by this function.
// dirs is an integer array with two elements.
// The first element indicates the type of movements (1~4)
// The second element indicates the number of steps to go in that direction.
void checkDistance(int* dirs) {
performMovement(&iMove, 1);
shouldChangeDirection = true;
Serial3.println("#6 P600");
delay(500);
int j = 0;
int maxDis = -1;
int dir = 0;
for(int i=600; i<=2400; i+=150) {
Serial3.print("#6P");
Serial3.println(i);
delay(200);
measureDistance(0x11);
int d = readDistance();
if(d==-1) {
d = 400;
}
if(d > maxDis) {
maxDis = d;
dir = i;
}
}
Serial3.println("#6 P1500");
delay(500);
if(maxDis < 40) {
// Measure backward distance.
Serial3.println("#7 P2400");
delay(500);
measureDistance(0x11);
int bd = readDistance();
Serial3.println("#7 P600");
delay(500);
if(bd > 40) {
dirs[0] = 4;
dirs[1] = (int)random(5, 10);
} else {
dirs[0] = 2;
dirs[1] = 5;
}
} else {
if(dir > 0) {
dir = (dir - 600) / 150;
if(dir<6) {
dirs[0] = 1;
dirs[1] = (6-dir);
} else if(dir>6) {
dirs[0] = 2;
dirs[1] = dir - 6;
} else {
dirs[0] = 3;
dirs[1] = (int)random(5, 10);
}
} else {
dirs[0] = 4;
dirs[1] = 2;
}
}
}
int steps = 0;
void loop() {
steps = 0;
if(shouldChangeDirection) {
int dirs[] = {0, 0};
checkDistance(dirs);
move = dirs[0];
steps = dirs[1];
} else {
move = random(1, 4);
if(lastMove==1 || lastMove==2) {
move = 3;
} else if(lastMove==0) {
move = 3;
}
}
if(move==1) {
if(steps==0) {
steps = (int)random(3, 6);
}
turnLeft((int)steps);
}
else if(move==2) {
if(steps==0) {
steps = (int)random(3, 6);
}
turnRight(steps);
}
else if(move==4) {
if(steps==0) {
steps = (int)random(5, 15);
}
goBackward(steps);
}
else {
if(steps==0) {
steps = (int)random(5, 15);
}
goForward(steps);
}
lastMove = move;
}
#include "LCD12864RSPI.h"
// Chinese character display
unsigned char currentOrder[] = {0xC3, 0xFC, 0xC1, 0xEE, ':'};
unsigned char left[] = {0xD7, 0xF3, 0xD7, 0xAA};
unsigned char right[] = {0xD3, 0xD2, 0xD7, 0xAA};
unsigned char forward[] = {0xCF, 0xF2, 0xC7, 0xB0};
unsigned char backward[] = {0xCF, 0xF2, 0xBA, 0xF3};
unsigned char forwardBackward[] = {0xC7, 0xB0, 0xBA, 0xF3};
unsigned char stepCount[] = {0xB2, 0xBD, 0xCA, 0xFD, ':'};
unsigned char stepLabel[] = {0xB2, 0xBD};
// Structure to define movement
// A movement for example, left, consists of several phases.
typedef struct Movement{
int dir; // Identifier to indicate type of movement: 0 left; 1 right; 2 forward; 3 backward; 4 initialize.
int *times; // time in milliseconds used to perform each phase of a movement
char** servos; // servo position control
int phases; // number of phases in a single movement
int stepCount; // the number of steps for this type of movement.
};
Movement rMove; // Right movement
Movement lMove; // Left movement
Movement fMove; // Forward movement
Movement bMove; // Backward movement
Movement iMove; // Initialization movement
// Servo positions for each type of movement
char* lServos[] = {"#1 P1200 #4 P1200", "#0 P700 S1500 #3 P2300 S1500", "#1 P1500 S1000 #4 P1500 S1000", "#0 P1500 #3 P1500"};
char* rServos[] = {"#1 P2100 #4 P2100", "#0 P700 S1500 #3 P2300 S1500", "#1 P1500 S1000 #4 P1500 S1500", "#0 P1500 #3 P1500 "};
char* fServos[] = {"#1 P2000 #4 P1000", "#0 P700 S1500 #3 P2300 S1500", "#1 P700 S1000 #4 P2300 S1000", "#0 P1500 #3 P1500 "};
char* bServos[] = {"#1 P1000 #4 P2000", "#0 P700 S1500 #3 P2300 S1500", "#1 P2300 S1000 #4 P700 S1000", "#0 P1500 #3 P1500 "};
char* iServos[] = {"#0 P1500 #1 P1500 #2 P1500 #3 P1500 #4 P1500 #5 P1500"};
// Time used for each phase of each movement.
int lTimes[] = {200, 200, 200, 200};
int rTimes[] = {200, 200, 400, 200};
int fTimes[] = {300, 400, 500, 300};
int bTimes[] = {300, 400, 800, 300};
int iTimes[] = {500};
// Position to display messages.
int messagePosition[8] = {2, 5, 1, 5, 3, 5, 3, 5};
boolean shouldChangeDirection = false; // Should next movement be used to change direction, in case that an obstacle is detected by the ultrasonic sensor.
boolean isForward = true; // If current direction is forward
int EN = 2; // Pin number to enable XBee expansion board V5
// Measure distance using the URM04V2 ultrasonic sensor.
void measureDistance(byte device) {
digitalWrite(EN, HIGH);
// Trigger distance measurement.
uint8_t DScmd[6]={0x55,0xaa,device,0x00,0x01,0x00};
for(int i=0; i<6; i++) {
Serial.write(DScmd[i]);
DScmd[5] += DScmd[i];
}
delay(30);
// Send command to read measured distance.
uint8_t STcmd[6]={0x55,0xaa,device,0x00,0x02,0x00};
for(int i=0; i<6; i++) {
Serial.write(STcmd[i]);
STcmd[5] += STcmd[i];
}
delay(3);
}
// Return last measured distance by the URM04V2 ultrasonic sensor.
// -1 means the last measurement is out of range or unsuccessful.
int readDistance() {
uint8_t data[8];
digitalWrite(EN,LOW);
boolean done = false;
int counter = 0;
int result = -1;
while(!done){
int bytes = Serial.available();
if(bytes==8) {
for(int i=0; i<8; i++) {
data[i] = Serial.read();
}
result = (int)data[5] * 256 + data[6];
done = true;
} else {
delay(10);
counter++;
if(counter==5) {
done = true;
}
}
}
return result;
}
// Perform movement m by repeating it for steps times.
boolean performMovement(struct Movement *m, int steps) {
boolean inChange = false;
if(shouldChangeDirection) {
inChange = true;
}
for(int s=0; s< steps; s++) {
for(int i=0; i<m->phases; i++) {
Serial3.println(m->servos[i]);
delay(m->times[i]);
if(!inChange) {
changeHeading();
if(shouldChangeDirection) {
return shouldChangeDirection;
}
}
}
m->stepCount++;
int number = 0;
if(m->dir==3 || m->dir==4) {
number = fMove.stepCount + bMove.stepCount;
} else {
number = m->stepCount;
}
if(m->dir!=5) {
displayNumber(messagePosition[m->dir * 2], messagePosition[m->dir * 2 + 1], number);
}
}
if(inChange) {
shouldChangeDirection = false;
}
return false;
}
void setup()
{
lMove.servos = lServos;
lMove.times = lTimes;
lMove.phases = 4;
lMove.stepCount = 0;
lMove.dir = 0; //Left
rMove.servos = rServos;
rMove.times = rTimes;
rMove.phases = 4;
rMove.stepCount = 0;
rMove.dir = 1; //Right
fMove.servos = fServos;
fMove.times = fTimes;
fMove.phases = 4;
fMove.stepCount = 0;
fMove.dir = 2; //Forward
bMove.servos = bServos;
bMove.times = bTimes;
bMove.phases = 4;
bMove.stepCount = 0;
bMove.dir = 3; //Backward
iMove.servos =iServos;
iMove.times = iTimes;
iMove.phases = 1;
iMove.stepCount = 0;
iMove.dir = 5;
randomSeed(analogRead(0));
// Initialize LCD display.
LCDA.Initialise();
delay(100);
LCDA.CLEAR();
LCDA.DisplayString(0, 0, currentOrder, 5);
LCDA.DisplayString(1, 0, left, 4);
LCDA.DisplayString(1, 2, stepCount, 5);
LCDA.DisplayString(2, 0, right, 4);
LCDA.DisplayString(2, 2, stepCount, 5);
LCDA.DisplayString(3, 0, forwardBackward, 4);
LCDA.DisplayString(3, 2, stepCount, 5);
// Initialize all servos to neutral position.
Serial3.begin(115200);
Serial3.println("#0 P1500 #1 P1500 #2 P1500 #3 P1500 #4 P1500 #5 P1500 #6 P1500 #7 P600");
pinMode(EN, OUTPUT);
Serial.begin(19200);
delay(200);
digitalWrite(EN,HIGH);
delay(2000);
}
void changeHeading() {
measureDistance(0x11);
int distance = readDistance();
if(distance !=-1) {
if(isForward) {
if(distance < 15) {
shouldChangeDirection = true;
}
} else {
}
}
}
// Display the current order.
void displayCurrentOrder(unsigned char *order, int steps) {
LCDA.DisplayString(0, 3, order, 4);
String txt = String(steps);
char* buf = " ";
txt.toCharArray(buf, 4);
buf[2] = 0xB2;
buf[3] = 0xBD;
LCDA.DisplayString(0, 5, (unsigned char*)buf, 4);
}
// Display a number in row and column.
void displayNumber(int row, int column, int number) {
String txt = String(number);
char* buf = " ";
txt.toCharArray(buf, 5);
LCDA.DisplayString(row, column, (unsigned char*)buf, txt.length());
}
// Turn the robot to the right.
void turnRight(long steps) {
displayCurrentOrder(right, steps);
performMovement(&rMove, steps);
}
// Turn the robot to the left.
void turnLeft(long steps) {
displayCurrentOrder(left, steps);
performMovement(&lMove, steps);
}
// Move the robot forwards.
void goForward(long steps) {
displayCurrentOrder(forward, steps);
performMovement(&fMove, steps);
}
// Move th robot backwards.
void goBackward(long steps) {
displayCurrentOrder(backward, steps);
isForward = false;
performMovement(&bMove, steps);
isForward = true;
}
long lastMove = 0;
long move=0;
// Check which way to go next by finding the direction where the obstacle is the farest away.
// dirs will be setup by this function.
// dirs is an integer array with two elements.
// The first element indicates the type of movements (1~4)
// The second element indicates the number of steps to go in that direction.
void checkDistance(int* dirs) {
performMovement(&iMove, 1);
shouldChangeDirection = true;
Serial3.println("#6 P600");
delay(500);
int j = 0;
int maxDis = -1;
int dir = 0;
for(int i=600; i<=2400; i+=150) {
Serial3.print("#6P");
Serial3.println(i);
delay(200);
measureDistance(0x11);
int d = readDistance();
if(d==-1) {
d = 400;
}
if(d > maxDis) {
maxDis = d;
dir = i;
}
}
Serial3.println("#6 P1500");
delay(500);
if(maxDis < 40) {
// Measure backward distance.
Serial3.println("#7 P2400");
delay(500);
measureDistance(0x11);
int bd = readDistance();
Serial3.println("#7 P600");
delay(500);
if(bd > 40) {
dirs[0] = 4;
dirs[1] = (int)random(5, 10);
} else {
dirs[0] = 2;
dirs[1] = 5;
}
} else {
if(dir > 0) {
dir = (dir - 600) / 150;
if(dir<6) {
dirs[0] = 1;
dirs[1] = (6-dir);
} else if(dir>6) {
dirs[0] = 2;
dirs[1] = dir - 6;
} else {
dirs[0] = 3;
dirs[1] = (int)random(5, 10);
}
} else {
dirs[0] = 4;
dirs[1] = 2;
}
}
}
int steps = 0;
void loop() {
steps = 0;
if(shouldChangeDirection) {
int dirs[] = {0, 0};
checkDistance(dirs);
move = dirs[0];
steps = dirs[1];
} else {
move = random(1, 4);
if(lastMove==1 || lastMove==2) {
move = 3;
} else if(lastMove==0) {
move = 3;
}
}
if(move==1) {
if(steps==0) {
steps = (int)random(3, 6);
}
turnLeft((int)steps);
}
else if(move==2) {
if(steps==0) {
steps = (int)random(3, 6);
}
turnRight(steps);
}
else if(move==4) {
if(steps==0) {
steps = (int)random(5, 15);
}
goBackward(steps);
}
else {
if(steps==0) {
steps = (int)random(5, 15);
}
goForward(steps);
}
lastMove = move;
}